
Aula de Paulo César
Como visto na aula de torques, o momento de inércia é uma grandeza de grande importância quando estudamos a dinâmica de corpos rígidos, nessa aula aprofundaremos nossos conceitos a respeito desse tópico.
Quando tratamos de uma partícula com dimensões desprezíveis e massa constante, podemos afirmar:

analogamente, para um corpo rígido extenso sujeito à um torque resultante é possível escrever:

Observa-se desse modo um equivalente à massa do corpo na primeira situação para um corpo extenso em rotação, grandeza conhecida como momento de inércia que pode ser interpretada como a resistência de um material à mudanças em seu movimento angular. Para um distribuição discreta de  massas, estando a i-ésima massa a uma distância
massas, estando a i-ésima massa a uma distância  do eixo de rotação, o valor do momento de inércia é dado pela expressão:
do eixo de rotação, o valor do momento de inércia é dado pela expressão:

Figura 1: Esquema representativo das grandezas relevantes para o momento de inércia no caso discreto.
para uma distribuição contínua podemos imaginar infinitas massas infinitesimais, desse modo temos:

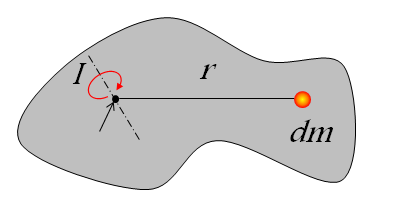
Figura 2: Esquema representativo das grandezas relevantes para o momento de inércia no caso contínuo.
Por exemplo, para uma barra delgada de massa  uniformemente distribuída ao longo de seu comprimento
uniformemente distribuída ao longo de seu comprimento  , o momento de inércia ao redor do centro de massa é dado por:
, o momento de inércia ao redor do centro de massa é dado por:


Caso o leitor não possua conhecimento de cálculo existem inúmeras tabelas que contém os valores dos momentos de inércia mais comuns.
A fim de facilitar o cálculo dos momentos de inércia apresentaremos dois teoremas que possibilitarão a obtenção dessas quantidades sem muito esforço. Considere um conjunto de massas em que o vetor  é a componente perpendicular do vetor posição da partícula em um referencial
é a componente perpendicular do vetor posição da partícula em um referencial  , além disso definiremos o vetor
, além disso definiremos o vetor  como o vetor da posição do centro de massa das partículas e o vetor
como o vetor da posição do centro de massa das partículas e o vetor  como a componente do vetor posição da i-ésima massa que é perpendicular ao eixo de rotação, conforme a figura a seguir:
como a componente do vetor posição da i-ésima massa que é perpendicular ao eixo de rotação, conforme a figura a seguir:
Figura 3: Imagem ilustrando os parâmetros relevantes para a determinação do momento de inércia de um corpo através do teorema dos eixos paralelos.
Assim é possível afirmar que:

portanto o momento de inércia do sistema no referencial é dado por:

Faremos então  , ou seja, o momento de inércia em relação ao centro de massa do sistema. Observe que
, ou seja, o momento de inércia em relação ao centro de massa do sistema. Observe que  é constante durante a soma das massas sendo possível dessa forma retirá-lo do somatório devido à propriedade
é constante durante a soma das massas sendo possível dessa forma retirá-lo do somatório devido à propriedade  resultando em:
resultando em:

Em que  , ou seja, a massa total do sistema. Porém o termo
, ou seja, a massa total do sistema. Porém o termo  é, por definição, a posição do centro de massa em seu próprio referencial vezes a massa total do conjunto e portanto o vetor nulo. Assim chegamos no teorema dos eixos paralelos:
é, por definição, a posição do centro de massa em seu próprio referencial vezes a massa total do conjunto e portanto o vetor nulo. Assim chegamos no teorema dos eixos paralelos:

A demonstração foi feita para um distribuição discreta porém os mesmos argumentos poderiam ser utilizados para o caso contínuo.
Agora suponha que o mesmo conjunto esteja disposto em um plano e possua momento de inércia  e
e  nos eixos
nos eixos  e
e  , respectivamente. Pela definição de momento de inércia no eixo
, respectivamente. Pela definição de momento de inércia no eixo  teremos:
teremos:

nesse caso a distância coincide com a distância da partícula à origem do sistema de referência de forma que  , como pode ser verificado pela imagem:
, como pode ser verificado pela imagem:

Figura 4: Imagem ilustrando os parâmetros relevantes para a determinação do momento de inércia de um corpo através do teorema dos eixos perpendiculares.
Portanto:

logo:

Esse é o teorema dos eixos perpendiculares, válido apenas para objetos planos. Novamente, os mesmos argumentos utilizados aqui poderiam ser usados para um distribuição contínua. De maneira geral, o momento de inércia em um eixo ortogonal ao plano do corpo é igual à soma dos momentos de inércia de dois momentos de inércia em eixos perpendiculares ao longo desse plano.
Continuando no cenário que estamos estudando, podemos encontrar a energia cinética de um conjunto de partículas se movendo. Para fazer isso, afirmaremos que a velocidade de uma partícula  pode ser expressa como a soma da velocidade do centro de massa
pode ser expressa como a soma da velocidade do centro de massa  do sistema com a velocidade da partícula em relação ao centro de massa
do sistema com a velocidade da partícula em relação ao centro de massa  , matematicamente:
, matematicamente:

logo, a energia cinética total do corpo é dada por:

Similarmente, o termo  representa a massa total do corpo vezes a velocidade de centro de massa em seu próprio referencial que é
representa a massa total do corpo vezes a velocidade de centro de massa em seu próprio referencial que é  . O módulo da velocidade de uma partícula no referencial do centro de massa é dada por
. O módulo da velocidade de uma partícula no referencial do centro de massa é dada por  portanto:
portanto:

Assim, é possível a calcular a energia cinética do corpo o tratando como uma partícula de dimensões desprezíveis de massa  e velocidade
e velocidade  e em seguida somar a contribuição relacionada à rotação do corpo dada por
e em seguida somar a contribuição relacionada à rotação do corpo dada por  fazendo novamente analogia ao caso linear em que
fazendo novamente analogia ao caso linear em que  e
e  . Mais uma vez, os argumentos que foram utilizados para partículas discretas seguem análogos ao caso contínuo.
. Mais uma vez, os argumentos que foram utilizados para partículas discretas seguem análogos ao caso contínuo.