
Aula de Diogo Netto
Revisado por Pedro Tsuchie
Introdução
Agora que já discutimos a cinemática, podemos começar nosso estudo de dinâmica, que consiste na parte da Física que estuda como agentes externos (forças, impulsos, etc.) alteram o movimento. Na dinâmica, o tratamento vetorial das grandezas como deslocamento, velocidade e aceleração será essencial.
Deslocamentos, velocidades, acelerações… Vetores!
Usando o conceito discutido na Aula 0, podemos descrever a posição de um objeto no plano (ou no espaço) através de um vetor  , como mostra a figura.
, como mostra a figura.

Dadas as posições  e
e  de um corpo nos instantes
de um corpo nos instantes  e
e  , adivinhe só… definimos a velocidade vetorial média como:
, adivinhe só… definimos a velocidade vetorial média como:

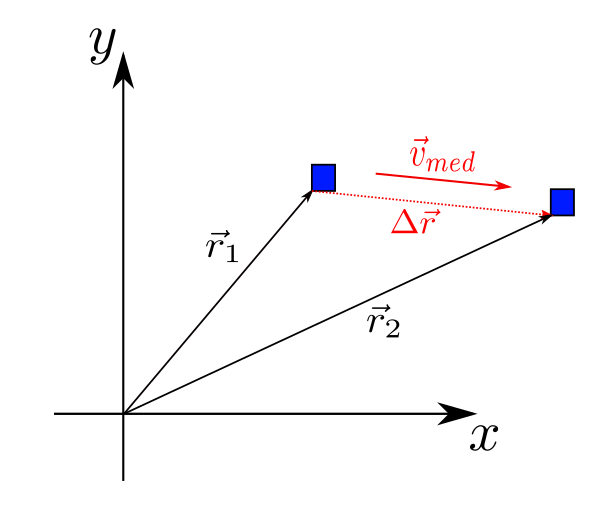
Note que  é paralelo a
é paralelo a 
Analogamente, dadas as velocidades  e
e  em e , definimos a aceleração vetorial média como:
em e , definimos a aceleração vetorial média como:


Note que  é paralelo a
é paralelo a 
Observação 1: de modo análogo ao que fizemos na Aula 1, podemos pensar nas grandezas instantâneas como sendo aquelas tomadas para intervalos de tempo muito pequenos.
Assim, a velocidade vetorial instantânea  (ou simplesmente velocidade) será aquela tomada quando os instantes e são muito próximos.
(ou simplesmente velocidade) será aquela tomada quando os instantes e são muito próximos.
Definimos a aceleração vetorial instantânea  (ou simplesmente aceleração) de modo análogo.
(ou simplesmente aceleração) de modo análogo.
Observação 2: Desenhando o deslocamento vetorial para instantes infinitamente próximos, chegamos que a velocidade tem direção tangente à trajetória.
Leis de Newton
Com a nossa discussão de vetores já feita, podemos falar das três leis que regem a dinâmica.
1ª Lei
Um corpo em repouso ou em movimento retilíneo uniforme (os dois casos em que a aceleração é vetorialmente nula) tenderá a permanecer nesse estado a menos que uma força externa aja no sistema. Tal Lei é também conhecida por Princípio da Inércia, pois expressa a tendência dos corpos de manter seus estados de movimento.
2ª Lei
Suponha que um corpo de massa  esteja sujeito a forças
esteja sujeito a forças  , definimos a força resultante como
, definimos a força resultante como  (note que a soma é vetorial!)
(note que a soma é vetorial!)

No caso, a 2ª Lei de Newton nos diz que (caso a massa do corpo não varie), vale que:

Essa equação aponta para dois fatos interessantes: Quanto mais massa um corpo possui, mais difícil é fornecer uma dada aceleração e a força e a aceleração possuem a mesma direção e sentido. De fato, não esperamos que ao empurrar uma caixa para a direita ela acelere para qualquer outro lugar!
3ª Lei
Suponha que dois corpos A e B interajam entre si (por meio de uma corda com massa desprezível, por exemplo)

No caso, chamando de  como a força que B exerce em A, e
como a força que B exerce em A, e  a força que A exerce em B (como mostrado acima), a 3ªLei de Newton nos diz que:
a força que A exerce em B (como mostrado acima), a 3ªLei de Newton nos diz que:

Detalhe muito importante: Note que pela nossa definição, as forças e agem em corpos diferentes, por isso não faz sentido falar que tais forças se anulam!
Máquina de Atwood: uma aplicação das Leis de Newton
Para mostrar como utilizamos as Leis de Newton para resolver problemas de dinâmica, vamos considerar o seguinte sistema, em que os corpos A e B (de massas  , respectivamente) estão ligados por uma corda inextensível e de massa desprezível, sendo que esta última passa por uma polia sem massa onde não há atrito.
, respectivamente) estão ligados por uma corda inextensível e de massa desprezível, sendo que esta última passa por uma polia sem massa onde não há atrito.

Pela 3ª Lei, as trações que agem em A e B devem ter módulos iguais, porém sentidos opostos, como mostrado na figura. Considerando que temos os pesos  e trações
e trações  como forças relevantes para o problema (daremos mais detalhes sobre essas forças na próxima aula), vamos escrever a 2ª Lei para o corpo A:
como forças relevantes para o problema (daremos mais detalhes sobre essas forças na próxima aula), vamos escrever a 2ª Lei para o corpo A:

E para o corpo B:

Pelo fato do fio ser inextensível, A e B devem se mover uma mesma distância em um mesmo tempo. Podemos escrever isso como  . Considerando
. Considerando  temos que B se move para baixo e A para cima, conforme a figura. Assim, podemos denotar
temos que B se move para baixo e A para cima, conforme a figura. Assim, podemos denotar  e
e  .
.
Assim,


Resolvendo o sistema, obtemos  e
e 
Vínculos geométricos
No exemplo em questão, foi fácil encontrar o vínculo geométrico envolvido. Porém em muitos exercícios essa é a parte mais complicada. Portanto listaremos métodos que podem tornar o processo mais fácil. Recomendamos que você leia esta ideia, mas apresentaremos outra maneira de você encontrar os vínculos. A ideia consiste em dizer que o trabalho do fio depois dos deslocamentos é  . Se você ainda não sabe o que é trabalho, para nossos propósitos, basta saber que ele é força vezes distância. Como exemplo, tente resolver os exercícios, que utilizarão essa ideia na solução.
. Se você ainda não sabe o que é trabalho, para nossos propósitos, basta saber que ele é força vezes distância. Como exemplo, tente resolver os exercícios, que utilizarão essa ideia na solução.
Truques
1) Em exercícios de dinâmica sempre defina um sentido positivo e mantenha-o até o fim do problema.
2) Tente escolher um sistema para marcar as forças de maneira que você ignore forças que não são pedidas ou conhecidas.
3) Teste casos limites: alguma massa quase , alguma massa muito grande, ângulos muito pequenos, ângulos muito grandes, etc. Enfim, teste casos em que você sabe o que irá acontecer para conferir se sua resposta está correta. Isso vai fazer com que você perceba erros de conta.
4) Outra coisa para perceber erros é sempre checar se suas respostas estão dimensionamente corretas, isto é , veja se as unidades estão batendo. Por exemplo se você chegar que  , você sabe que está errado pois força não tem dimensão de velocidade vezes massa.
, você sabe que está errado pois força não tem dimensão de velocidade vezes massa.