
Escrita por Rafael Moreno Ribeiro
Mais uma vez voltamos ao tema de conservações, assunto esse que reside no coração da Física. Dessa vez trataremos da conservação do Momento Linear, uma grandeza muito menos conhecida que a Energia, mas que possui também um impacto enorme em nosso cotidiano e no desenvolvimento humano. Por exemplo, a conservação do Momento Linear em um carro em movimento torna necessário o uso dos cintos de segurança para que não sejamos arremessados contra o para-brisa, e esse mesmo princípio permite que foguetes se direcionem no espaço. Desse modo, vamos para mais uma sessão do nosso Curso de Física!
Momento
A 2ª Lei de Newton é definida da seguinte forma:
 ,
,
onde  representa a força externa aplicada ao sistema e
representa a força externa aplicada ao sistema e  representa o momento linear do sistema. O vetor é definido como
representa o momento linear do sistema. O vetor é definido como  , de modo que se o sistema possui massa constante, essa expressão se reduz à conhecida:
, de modo que se o sistema possui massa constante, essa expressão se reduz à conhecida:

Assim, a 2ª Lei de Newton pode ser resumida da seguinte forma:
“Um sistema sempre conserva o seu momento linear, até que uma força passe a agir sobre ele.”
Vale ressaltar o comportamento vetorial de : o momento de um sistema é a soma vetorial do momento de cada um de seus componentes. Tome como exemplo, a figura abaixo:
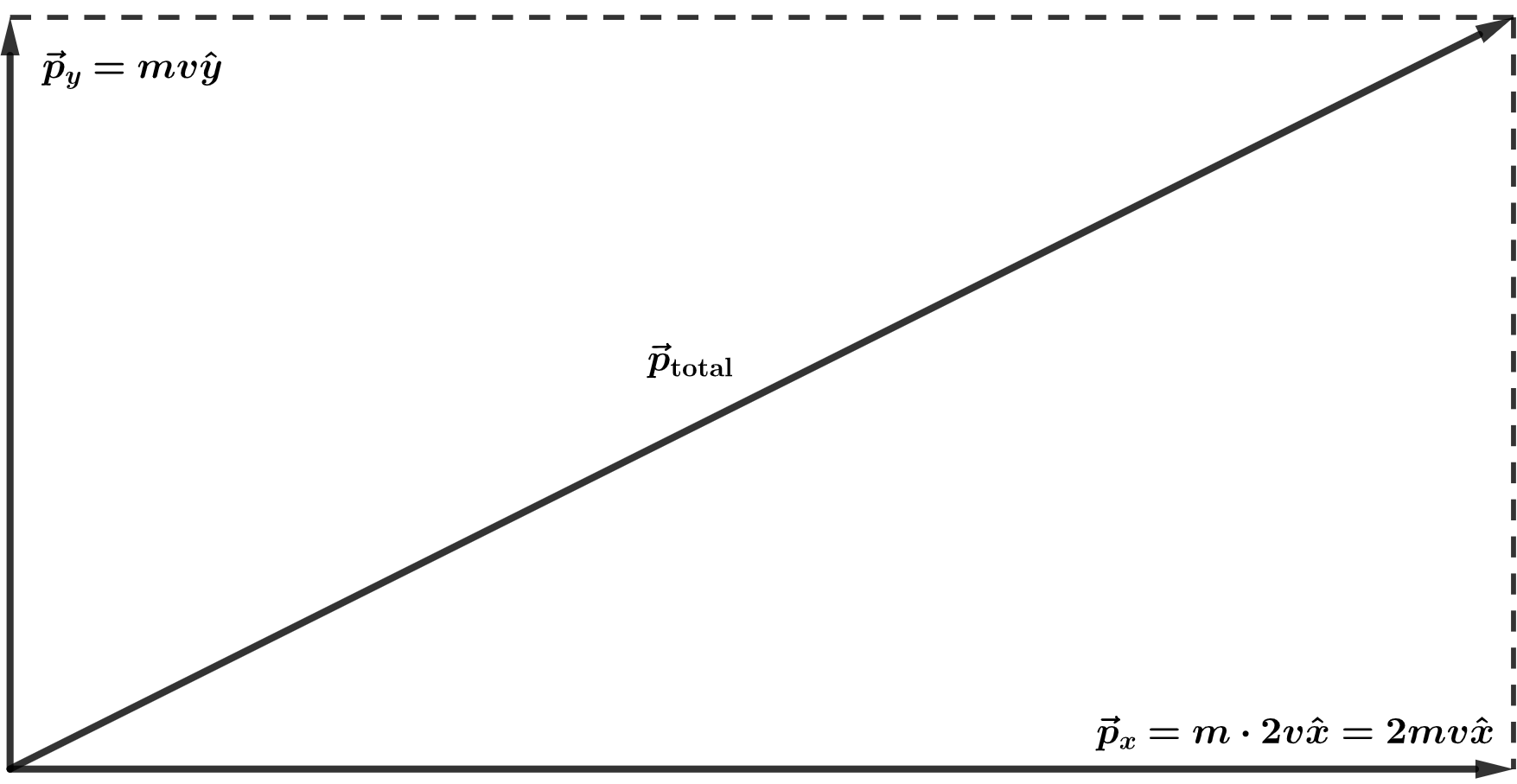
 ,
,
que não aponta na direção de nenhum dos dois movimentos.
Bom, nenhuma dessas definições adiantaria se não tirássemos algo de útil delas. Retornemos à equação (1). No caso de a força resultante ser nula, podemos dizer que:
 constante
constante
Desse modo, o Momento de um sistema isolado será uma quantidade conservada, uma vez que não varia com o tempo.
Exemplo:
Uma partícula de massa  e velocidade
e velocidade  colide frontalmente com outra partícula de mesma massa e que se encontrava em repouso. Determine a velocidade de cada corpo após a colisão.
colide frontalmente com outra partícula de mesma massa e que se encontrava em repouso. Determine a velocidade de cada corpo após a colisão.

Antes da colisão, o momento do sistema era dado por  , e sua energia era
, e sua energia era  . Como a colisão é frontal, todo o movimento após a colisão se dá em
. Como a colisão é frontal, todo o movimento após a colisão se dá em  . Conservando energia e momento, temos as seguintes equações:
. Conservando energia e momento, temos as seguintes equações:


Esse sistema de 2º grau admite duas possíveis respostas:  e
e  ou
ou  e
e  . O primeiro caso corresponde a não termos colisão alguma, que não é o que buscamos. Logo, a resposta para o nosso problema é:
. O primeiro caso corresponde a não termos colisão alguma, que não é o que buscamos. Logo, a resposta para o nosso problema é:

Esse resultado já é conhecido por jogadores de sinuca, uma vez que se aplica perfeitamente ao jogo: uma tacada central da bola branca com qualquer outra bola faz com que ela pare e a bola atingida avance com a velocidade inicial da bola branca.
Outro exemplo interessante de se pensar é o seguinte:
Você, um pizzaiolo desastrado, joga sua massa de pizza diretamente na parede, de modo que ela fique grudada. O que ocorre com o momento da massa?
Em primeira análise, parece ser o caso de que não há conservação do momento linear, uma vez que a pizza parece deixa de se mover. No entanto, a massa não é um sistema isolado, e não poderíamos esperar que seu momento se conservasse. O sistema massa-Terra, por sua vez, é isolado, desprezando a ação da gravidade solar, que não age tão rapidamente quanto a força normal da parede. Com isso, vemos que todo o momento da nossa massa de pizza tem que ter ido para a Terra! É claro que considerando a magnitude da massa da Terra, o efeito desse momento será desprezível, mas é o que acontece na prática.
Algo interessante de se notar é o fato de que o momento do sistema depende do referencial que o mede, uma vez que a velocidade também muda de acordo com seu sistema de referência. Por exemplo, uma árvore na beira da estrada não possui momento linear no referencial da Terra, pois é vista em repouso. Já no referencial de um carro passando, a árvore possui um momento não nulo. Em especial, se adotamos o Centro de Massa (CM) do sistema como o nosso referencial, o momento linear total é sempre nulo! Esse resultado vem a ser muito útil na teoria de colisões, tópico da próxima aula.
Impulso
Até o momento nós estudamos sistemas isolados ( ). Mas e quando essa resultante não é nula? Nesse caso, podemos escrever que:
). Mas e quando essa resultante não é nula? Nesse caso, podemos escrever que:

Definimos o lado direito da equação acima como sendo o Impulso de uma força sobre o corpo, e usamos o símbolo  para representar essa grandeza. Com isso:
para representar essa grandeza. Com isso:

Em muitos casos não é possível determinar a magnitude de uma força, mas podemos determinar o seu impulso. Por exemplo, considere um corpo arremessado com velocidade horizontal contra uma parede sem que haja perda de energia. O corpo colide com a parede e inverte a componente horizontal de sua velocidade, de modo que a energia do sistema é constante. Não podemos dizer quanto vale a força de reação normal da parede, mas sabemos que o seu impulso é dado por  . Do mesmo modo, não sabemos o módulo da força com que chutamos uma bola, mas podemos saber o seu impulso se conhecermos a velocidade da bola logo após o chute:
. Do mesmo modo, não sabemos o módulo da força com que chutamos uma bola, mas podemos saber o seu impulso se conhecermos a velocidade da bola logo após o chute:  !
!
Uma questão em que esse conceito é muito útil é o seguinte:
Uma bola colide com o chão, de modo que sua velocidade em  se inverte. Logo antes do contato, a velocidade da bola era
se inverte. Logo antes do contato, a velocidade da bola era  . Sabendo que a bola tem um coeficiente de atrito
. Sabendo que a bola tem um coeficiente de atrito  com o chão, determine sua velocidade logo após a colisão.
com o chão, determine sua velocidade logo após a colisão.
Sabemos que o Impulso da normal foi  . A única força atuando em será o atrito, de forma que:
. A única força atuando em será o atrito, de forma que:

Com isso, obtemos que:

Logo:
