Escrito por Ualype Uchôa, Paulo Henrique e Wanderson Patricio
Iniciante
Análise de dados: Pêndulo simples
 Podemos facilmente calcular as médias e suas respectivas incertezas facilmente utilizando o modo SD da calculadora (ou na primeira tela do modo REG Lin) após inserir as medidas. Lembre-se que a incerteza associada à média aritmética de um conjunto de medidas é a soma quadrática do erro de medição da tabela com o desvio padrão da média sobre
Podemos facilmente calcular as médias e suas respectivas incertezas facilmente utilizando o modo SD da calculadora (ou na primeira tela do modo REG Lin) após inserir as medidas. Lembre-se que a incerteza associada à média aritmética de um conjunto de medidas é a soma quadrática do erro de medição da tabela com o desvio padrão da média sobre  (N é o número de medidas), i.e.
(N é o número de medidas), i.e.  , sendo
, sendo  o desvio padrão da média da forma que é obtido a partir da calculadora científica (algumas calculadoras podem ter sutis variações na notação e nos valores obtidos). Verifica-se que, pela proximidade de valores entre os dados, a incerteza associada ao desvio padrão é desprezível frente ao erro experimental, e portanto já colocou-se
o desvio padrão da média da forma que é obtido a partir da calculadora científica (algumas calculadoras podem ter sutis variações na notação e nos valores obtidos). Verifica-se que, pela proximidade de valores entre os dados, a incerteza associada ao desvio padrão é desprezível frente ao erro experimental, e portanto já colocou-se 
 ao topo da tabela como a incerteza para cada média. Segue abaixo a tabela completa.
ao topo da tabela como a incerteza para cada média. Segue abaixo a tabela completa.
OBS: Em uma prova, é recomendado colocar o nome da tabela logo acima desta.

Tabela 1: Medidas do tempo de dez oscilações para diferentes comprimentos de pêndulo
 Para calcular
Para calcular  , fazemos
, fazemos  , e analogamente para sua incerteza:
, e analogamente para sua incerteza:  . Para a incerteza de
. Para a incerteza de  , podemos consultar a tabela de propagação do resumo fornecido para o caso
, podemos consultar a tabela de propagação do resumo fornecido para o caso  com
com  , sendo o erro propagado
, sendo o erro propagado  , ou simplesmente derivar
, ou simplesmente derivar  (se o aluno souber, é claro). Em qualquer caso,
(se o aluno souber, é claro). Em qualquer caso,  . Segue abaixo a tabela pedida.
. Segue abaixo a tabela pedida.
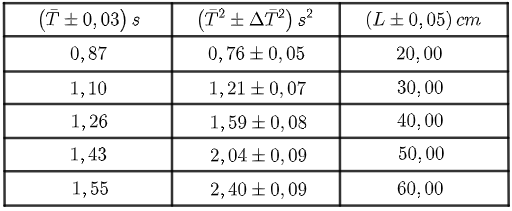
Tabela 2: Valores de período e período ao quadrado para diferentes comprimentos
 Segue abaixo o gráfico pedido.
Segue abaixo o gráfico pedido.

Figura 1: Gráfico linearizado de versus 
Utilizamos o modelo de papel milimetrado que pode ser obtido clicando aqui. No gráfico, utilizamos uma escala de 1 "quadrado" 

 no eixo
no eixo  e
e  "quadrados"
"quadrados" 
 no eixo
no eixo  . Destacamos também uma breve legenda no canto inferior direito e informações relevantes no canto superior esquerdo: o tipo de função ajustada ao conjunto de pontos, coeficientes angular e linear e o coeficiente de correlação
. Destacamos também uma breve legenda no canto inferior direito e informações relevantes no canto superior esquerdo: o tipo de função ajustada ao conjunto de pontos, coeficientes angular e linear e o coeficiente de correlação  , além das barras de erro devidamente inseridas (apenas em , pois são menores que 1mm em ). Mais informações sobre como essas quantidades foram obtidas seguem no próximo item.
, além das barras de erro devidamente inseridas (apenas em , pois são menores que 1mm em ). Mais informações sobre como essas quantidades foram obtidas seguem no próximo item.
OBS: Buscamos obter uma escala "bonita" (usando números pares ou múltipos de 5) e ocupar o máximo de espaço do gráfico ao mesmo tempo. Muitas vezes, o primeiro torna-se bastante difícil, especialmente numa prova quando há tempo limitado; portanto, não se atenha muito à isso. No entanto, busque SEMPRE ocupar a maior área possível no seu gráfico (a partir de 70% do papel se torna aceitável).
 Utilizaremos o método de regressão linear, mas encorajo os alunos a resolverem utilizando o . Para isso, colocamos primeiramente os pares
Utilizaremos o método de regressão linear, mas encorajo os alunos a resolverem utilizando o . Para isso, colocamos primeiramente os pares  no modo REG Lin da calculadora. Com isso, podemos obter facilmente os valores brutos dos coeficientes
no modo REG Lin da calculadora. Com isso, podemos obter facilmente os valores brutos dos coeficientes  ,
,  e da reta ajustada aos pontos:
e da reta ajustada aos pontos:



onde omitimos, por enquanto, as unidades intrínsecas à e . Agora, podemos estimar as incertezas dos coeficientes a partir das fórmulas:
 ,
,
 .
.
Em que  é o número de pontos experimentais e o coeficiente de correlação.
é o número de pontos experimentais e o coeficiente de correlação.
Obtemos, já respeitando as regras de algarismos significativos:
 e
e 
Agora, podemos escrever e de forma adequada, respeitando os algarismos significativos das incertezas:
 ,
,
 .
.
Por fim, escolhemos duas abcissas quaisquer  e
e  , das quais extraímos as ordenadas
, das quais extraímos as ordenadas  e
e  na reta ajustada
na reta ajustada  . Marcando (apenas para orientação, não deixe-os no produto final) a localização desses pontos no gráfico, traçamos uma reta colinear à estes que é exatamente a reta ajustada.
. Marcando (apenas para orientação, não deixe-os no produto final) a localização desses pontos no gráfico, traçamos uma reta colinear à estes que é exatamente a reta ajustada.
 Percebendo que:
Percebendo que:

 .
.
Para o caso  (
( ) com
) com  , o erro propagado é
, o erro propagado é  , logo propagamos a incerteza
, logo propagamos a incerteza  como sendo
como sendo
 .
.
Portanto, obtemos  ou, no SI:
ou, no SI:
 .
.
Um boa forma de comparar com o valor esperado é computando a exatidão da medida:
 ,
,
o que constitui uma medida bastante exata (exatidões de até  encaixam-se nessa categoria), mesmo não sendo aparentemente tão próxima da esperada. Vale também mencionar que a incerteza da medida cobre o valor esperado.
encaixam-se nessa categoria), mesmo não sendo aparentemente tão próxima da esperada. Vale também mencionar que a incerteza da medida cobre o valor esperado.
OBS: Detalhou-se bastante a solução para deixar claro que metodologias foram e são comumente usadas, auxiliando o aluno. Em uma prova como a da OBF isso não é necessário; escreva e mostre apenas o que for pedido e ideias chave para o entendimento do corretor.
Tabela 1: Medidas do tempo de dez oscilações para diferentes comprimentos de pêndulo
Tabela 2: Valores de período e período ao quadrado para diferentes comprimentos
e
Figura 1: Gráfico linearizado de versus
.
A medida possui uma exatidão de  em relação ao valor esperado, constituindo um bom resultado.
em relação ao valor esperado, constituindo um bom resultado.
Intermediário
Cálculo de incerteza, construção de tabelas e gráficos.
a)
Após um intervalo de tempo  , a energia transferida para o sistema é
, a energia transferida para o sistema é  . Essa energia é usada para alterar em
. Essa energia é usada para alterar em  a temperatura do sistema, logo:
a temperatura do sistema, logo:

b)

Usando a função regressão linear da calculadora, obtemos o coeficiente angular :

Onde foi usado o valor  para a incerteza dessa quantidade, onde é o coeficiente de correlação e é o número de pontos experimentais. Dessa forma, podemos inserir o valor de para
para a incerteza dessa quantidade, onde é o coeficiente de correlação e é o número de pontos experimentais. Dessa forma, podemos inserir o valor de para  na tabela do enunciado.
na tabela do enunciado.
c)
Note que  . Com isso, podemos construir a tabela requerida:
. Com isso, podemos construir a tabela requerida:

d)

e)
Inserindo os valores de e  na função regressão linear da calculadora, obtemos os valores do coeficientes
na função regressão linear da calculadora, obtemos os valores do coeficientes  e
e  :
:


Onde  e
e  .
.
f)
Como  , obtemos:
, obtemos:  , onde foi usado que
, onde foi usado que  .
.
É conhecido o fato de que o calor específico real da água é dado por  . Portanto,
. Portanto,  , o que confere boa credibilidade para o resultado do experimento.
, o que confere boa credibilidade para o resultado do experimento.
a)
b)
Gráfico
c)
Tabela
d)
Gráfico
e)
f)
Avançado
Cálculo de momento de inércia, tratamento de dados, cálculo de erros, montagem de gráficos e tabelas.
Parte A
Como o corpo é achatado, podemos utilizar o teorema dos eixos perpendiculares, calculando primeiramente os momentos de inércia dos eixos perpendiculares primeiro.

Figura 01: Eixos perpendiculares
Como a espessura da barra é desprezível, o momento de inércia ao redor do eixo é o mesmo que o de uma barra fina de comprimento ao redor de seu centro, ou seja:

Analogamente, o momento de inércia ao redor do eixo é:

Pelo teorema dos eixos perpendiculares temos:

Portanto:

Para o cálculo da incerteza, utilizaremos a tabela de incerteza da OBF.
Separaremos inicialmente o nosso momento de inércia como a soma de duas funções:

Com  e
e  .
.
 Calculando a incerteza de
Calculando a incerteza de  :
:
Como a nossa função possui uma parte constante, temos:
 Eq(01)
Eq(01)
 Calculando a incerteza de
Calculando a incerteza de  :
:
Como este é um produto, utilizaremos a regra do produto para as incertezas:
 Eq(02)
Eq(02)
 Calculando a incerteza de
Calculando a incerteza de 
Pela regra da potência temos:
 Eq(03)
Eq(03)
Juntando as Eq(03) e Eq(02):


 Eq(04)
Eq(04)
Juntando as Eq(04) e Eq(01):

Analogamente, podemos calcular a incerteza de  :
:

Como o momento de inércia é dado pela soma das funções e , temos que:

![(\sigma_I)^2=\left(\dfrac{ma^2}{12}\right)^2\left[\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{2\sigma_a}{a}\right)^2\right]^2+\left(\dfrac{mb^2}{12}\right)^2\left[\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{2\sigma_b}{b}\right)^2\right]^2](https://i0.wp.com/noic.com.br/wp-content/plugins/latex/cache/tex_671c8d79e241c3bb7db31f0d2a26dceb.gif?w=640&ssl=1)
![\boxed{\sigma_I=\sqrt{\left(\dfrac{ma^2}{12}\right)^2\left[\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{2\sigma_a}{a}\right)^2\right]^2+\left(\dfrac{mb^2}{12}\right)^2\left[\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{2\sigma_b}{b}\right)^2\right]^2}}](https://i0.wp.com/noic.com.br/wp-content/plugins/latex/cache/tex_6f06fcb1b224ec8a63f17aa473bf0a95.gif?w=640&ssl=1)
Transformando os valores fornecidos para o SI:
 ,
,  ,
,  ,
,  e
e 
Aplicando valores chegamos a:

Portanto, calculado o valor para o momento de inércia, chegamos a:

Parte B
Para essa solução, utilizaremos a definição de momento de inércia diretamente:


Figura 02: Fita adesiva
sendo  a densidade superficial de área temos:
a densidade superficial de área temos:

Logo:



Logo:

Análogo ao resultado encontrado na parte A, temos:
![\boxed{\sigma_I=\sqrt{\left(\dfrac{Md_1^2}{8}\right)^2\left[\left(\dfrac{\sigma_M}{M}\right)^2+\left(\dfrac{2\sigma_{d_1}}{d_1}\right)^2\right]^2+\left(\dfrac{Md_2^2}{8}\right)^2\left[\left(\dfrac{\sigma_M}{M}\right)^2+\left(\dfrac{2\sigma_{d_2}}{d_2}\right)^2\right]^2}}](https://i0.wp.com/noic.com.br/wp-content/plugins/latex/cache/tex_6ae3d66120a8c51d8532edc7f651d4c6.gif?w=640&ssl=1)
Aplicando valores:

Calculando o valor para o momento de inércia e aplicando a incerteza:

Parte C
Pelo teorema dos eixos paralelos, sabemos que o momento de inércia em relação a um ponto de apoio a uma distância  é:
é:


Aplicando a segunda lei de Newton para a rotação:


Como o ângulo é pequeno:

Portanto:

Essa é a equação de um MHS, seu período de oscilação é:

Pela desigualdade das médias temos que:

A igualdade ocorre para  .
.
Portanto:

O valor mínimo ocorrerá para:


Plotando o gráfico do período em função da distância temos:

Figura 03: Gráfico  x
x
Aproximando o gráfico ao redor da abscissa de período mínimo:

Figura 04: Aproximação da Figura 03
Olhando para a figura, podemos obter um valor aproximado para o raio em torno de  .
.

OBS: Qualver valor entre  e
e  também é uma aproximação boa.
também é uma aproximação boa.
Primeiramente, iremos fazer uma tabela de  e
e  , com suas respectivas incertezas:
, com suas respectivas incertezas:

Figura 05: Tabela e
Plotando o gráfico de em função de obtemos:

Figura 06: Gráfico x
Organizando um pouco a equação do período, chegamos a:

Se renomearmos as variáveis:
 ,
,  ,
,  , e
, e 
Temos que:

Essa é a equação de uma reta.
Utilizando a função regressão linear da calculadora casio, achamos:
 e
e 


Aplicando valores chegamos a:


Primeiramente, temos que:

Da equação para o  temos:
temos:


Aplicando valores chegamos a:

Parte A
Demonstração
Parte B
Demontração
Parte C
Demonstração
Demonstração