
Escrito por Ualype Uchôa, Paulo Henrique e Wanderson Patricio
Iniciante
Análise de dados: Pêndulo simples
$$a)$$ Podemos facilmente calcular as médias e suas respectivas incertezas facilmente utilizando o modo SD da calculadora (ou na primeira tela do modo REG Lin) após inserir as medidas. Lembre-se que a incerteza associada à média aritmética de um conjunto de medidas é a soma quadrática do erro de medição da tabela com o desvio padrão da média sobre $$\sqrt{N}$$ (N é o número de medidas), i.e. $$\Delta \bar{t}=\sqrt{0,3^2+\left(sx/ \sqrt{N}\right)^2}$$, sendo $$sx$$ o desvio padrão da média da forma que é obtido a partir da calculadora científica (algumas calculadoras podem ter sutis variações na notação e nos valores obtidos). Verifica-se que, pela proximidade de valores entre os dados, a incerteza associada ao desvio padrão é desprezível frente ao erro experimental, e portanto já colocou-se $$0,3$$ $$s$$ ao topo da tabela como a incerteza para cada média. Segue abaixo a tabela completa.
OBS: Em uma prova, é recomendado colocar o nome da tabela logo acima desta.

Tabela 1: Medidas do tempo de dez oscilações para diferentes comprimentos de pêndulo
$$b)$$ Para calcular $$\bar{T}$$, fazemos $$\bar{t}/10$$, e analogamente para sua incerteza: $$\Delta \bar{T}=\Delta \bar{t}/10$$. Para a incerteza de $$\Delta \bar{T}^2$$, podemos consultar a tabela de propagação do resumo fornecido para o caso $$w=x^m$$ com $$m=2$$, sendo o erro propagado $$\Delta w=|2x\Delta x|$$, ou simplesmente derivar $$\bar{T}^2$$ (se o aluno souber, é claro). Em qualquer caso, $$\Delta \bar{T}^2=2\bar{T}\Delta\bar{T}$$. Segue abaixo a tabela pedida.
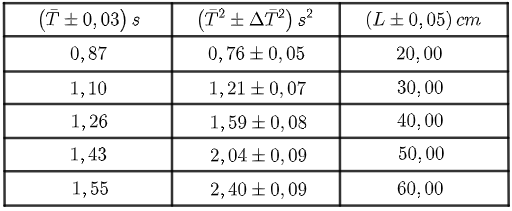
Tabela 2: Valores de período e período ao quadrado para diferentes comprimentos
$$c)$$ Segue abaixo o gráfico pedido.

Figura 1: Gráfico linearizado de $$\bar{T}^2$$ versus $$L$$
Utilizamos o modelo de papel milimetrado que pode ser obtido clicando aqui. No gráfico, utilizamos uma escala de 1 “quadrado” $$\rightarrow$$ $$0,10$$ $$s^2$$ no eixo $$y$$ e $$3$$ “quadrados” $$\rightarrow$$ $$5$$ $$cm$$ no eixo $$x$$. Destacamos também uma breve legenda no canto inferior direito e informações relevantes no canto superior esquerdo: o tipo de função ajustada ao conjunto de pontos, coeficientes angular e linear e o coeficiente de correlação $$r$$, além das barras de erro devidamente inseridas (apenas em $$y$$, pois são menores que 1mm em $$x$$). Mais informações sobre como essas quantidades foram obtidas seguem no próximo item.
OBS: Buscamos obter uma escala “bonita” (usando números pares ou múltipos de 5) e ocupar o máximo de espaço do gráfico ao mesmo tempo. Muitas vezes, o primeiro torna-se bastante difícil, especialmente numa prova quando há tempo limitado; portanto, não se atenha muito à isso. No entanto, busque SEMPRE ocupar a maior área possível no seu gráfico (a partir de 70% do papel se torna aceitável).
$$d)$$ Utilizaremos o método de regressão linear, mas encorajo os alunos a resolverem utilizando o . Para isso, colocamos primeiramente os pares $$(x,y)$$ no modo REG Lin da calculadora. Com isso, podemos obter facilmente os valores brutos dos coeficientes $$a$$, $$b$$ e $$r$$ da reta ajustada aos pontos:
$$a=-0,044$$
$$b=0,0411$$
$$r=0,99935$$
onde omitimos, por enquanto, as unidades intrínsecas à $$a$$ e $$b$$. Agora, podemos estimar as incertezas dos coeficientes a partir das fórmulas:
$$\Delta a=\displaystyle |\sqrt{\dfrac{\displaystyle \sum_{i=1}^{N} x_i^2}{N}}* \Delta b|$$,
$$\Delta b=\displaystyle |\sqrt{\dfrac{\dfrac{1}{r^2}-1}{N-2}} * b|$$.
Em que $$N$$ é o número de pontos experimentais e $$r$$ o coeficiente de correlação.
Obtemos, já respeitando as regras de algarismos significativos:
$$\Delta a= 0,04$$ e $$\Delta b =0,0009$$
Agora, podemos escrever $$a$$ e $$b$$ de forma adequada, respeitando os algarismos significativos das incertezas:
$$\boxed{a=-0,04 \pm 0,04}$$,
$$\boxed{b=\left(4,11 \pm 0,09\right) *10^{-2}}$$.
Por fim, escolhemos duas abcissas quaisquer $$x_1$$ e $$x_2$$, das quais extraímos as ordenadas $$y_1$$ e $$y_2$$ na reta ajustada $$y=ax+b$$. Marcando (apenas para orientação, não deixe-os no produto final) a localização desses pontos no gráfico, traçamos uma reta colinear à estes que é exatamente a reta ajustada.
$$e)$$ Percebendo que:
$$b=\dfrac{4 \pi^2}{g}$$ $$\rightarrow$$ $$g=\dfrac{4 \pi^2}{b}$$.
Para o caso $$w=ax^m$$ ($$a=cte$$) com $$m=-1$$, o erro propagado é $$\Delta w=|a \Delta x/x^2|$$, logo propagamos a incerteza $$\Delta g$$ como sendo
$$\Delta g=\dfrac{4 \pi^2}{b^2} \Delta b=21\,cm/s^2$$.
Portanto, obtemos $$g=\left(9,61 \pm 0,21\right)*10^2 \,cm/s^2$$ ou, no SI:
$$\boxed{g=\left(9,61 \pm 0,21\right)\,m/s^2}$$.
Um boa forma de comparar com o valor esperado é computando a exatidão da medida:
$$|\dfrac{g-g_{teo}}{g_{teo}}|*100 \%=2\%$$,
o que constitui uma medida bastante exata (exatidões de até $$5\%$$ encaixam-se nessa categoria), mesmo não sendo aparentemente tão próxima da esperada. Vale também mencionar que a incerteza da medida cobre o valor esperado.
OBS: Detalhou-se bastante a solução para deixar claro que metodologias foram e são comumente usadas, auxiliando o aluno. Em uma prova como a da OBF isso não é necessário; escreva e mostre apenas o que for pedido e ideias chave para o entendimento do corretor.
$$a)$$
Tabela 1: Medidas do tempo de dez oscilações para diferentes comprimentos de pêndulo
$$b)$$
Tabela 2: Valores de período e período ao quadrado para diferentes comprimentos
$$c)$$ e $$d)$$
Figura 1: Gráfico linearizado de $$\bar{T}^2$$ versus $$L$$
$$e)$$
$$\boxed{g=\left(9,61 \pm 0,21\right)\,m/s^2}$$.
A medida possui uma exatidão de $$2\%$$ em relação ao valor esperado, constituindo um bom resultado.
Intermediário
Cálculo de incerteza, construção de tabelas e gráficos.
a)
Após um intervalo de tempo $$\Delta{t}$$, a energia transferida para o sistema é $$P\Delta{t}$$. Essa energia é usada para alterar em $$\Delta{T}$$ a temperatura do sistema, logo:
\[P\Delta{t}=\left(Mc+C_e\right)\Delta{T}\to{a\left(Mc+C_e\right)=P}\]
b)

Usando a função regressão linear da calculadora, obtemos o coeficiente angular $$a$$:
\[a=(0,3883\pm 0,0005)(K/min)\]
Onde foi usado o valor $$\Delta a=\displaystyle |\sqrt{\dfrac{\dfrac{1}{r^2}-1}{N-2}} * a|$$ para a incerteza dessa quantidade, onde $$r$$ é o coeficiente de correlação e $$N$$ é o número de pontos experimentais. Dessa forma, podemos inserir o valor de $$a$$ para $$M=800g$$ na tabela do enunciado.
c)
Note que $$\Delta{y}=dfrac{1}{a^2}\Delta{a}$$. Com isso, podemos construir a tabela requerida:

d)

e)
Inserindo os valores de $$y$$ e $$M$$ na função regressão linear da calculadora, obtemos os valores do coeficientes $$A$$ e $$B$$:
\[A=(0,1867\pm 0,0023)(s/gK)\]
\[B=(5,6\pm 1,3)(s/K)\]
Onde $$\Delta{A}=\displaystyle |\sqrt{\dfrac{\dfrac{1}{r^2}-1}{N-2}} * A|$$ e $$\Delta{B}=\displaystyle |\sqrt{\dfrac{\displaystyle \sum_{i=1}^{N} x_i^2}{N}}* \Delta A|$$.
f)
Como $$c=AP$$, obtemos: $$c=(4,19\pm 0,05)(J/gK)$$, onde foi usado que $$\Delta c=\sqrt{(A\Delta P)^2+(P\Delta A)^2}$$.
É conhecido o fato de que o calor específico real da água é dado por $$c_R=4,12J/g^{\circ}C$$. Portanto, $$\dfrac{c-c_R}{c_R}\approx 1,7\%$$, o que confere boa credibilidade para o resultado do experimento.
a)
\[P\Delta{t}=\left(Mc+C_e\right)\Delta{T}\to{a\left(Mc+C_e\right)=P}\]
b)
Gráfico
c)
Tabela
d)
Gráfico
e)
\[A=(0,1867\pm 0,0023)(s/gK)\]
\[B=(5,6\pm 1,3)(s/K)\]
f)
$$c=(4,19\pm 0,05)(J/gK)$$
Avançado
Cálculo de momento de inércia, tratamento de dados, cálculo de erros, montagem de gráficos e tabelas.
Parte A
$$a)$$ Como o corpo é achatado, podemos utilizar o teorema dos eixos perpendiculares, calculando primeiramente os momentos de inércia dos eixos perpendiculares primeiro.

Figura 01: Eixos perpendiculares
Como a espessura da barra é desprezível, o momento de inércia ao redor do eixo $$x$$ é o mesmo que o de uma barra fina de comprimento $$a$$ ao redor de seu centro, ou seja:
$$I_x=\dfrac{ma^2}{12}$$
Analogamente, o momento de inércia ao redor do eixo $$y$$ é:
$$I_y=\dfrac{mb^2}{12}$$
Pelo teorema dos eixos perpendiculares temos:
$$I_z=I_x+I_y$$
Portanto:
$$\boxed{I=\dfrac{m(a^2+b^2)}{12}}$$
$$b)$$ Para o cálculo da incerteza, utilizaremos a tabela de incerteza da OBF.
Separaremos inicialmente o nosso momento de inércia como a soma de duas funções:
$$I=g(m,a)+h(m,b)$$
Com $$g(m,a)=\dfrac{ma^2}{12}$$ e $$h(m,b)=\dfrac{mb^2}{12}$$.
$$I)$$ Calculando a incerteza de $$g$$:
Como a nossa função possui uma parte constante, temos:
$$\sigma_g=\dfrac{1}{12}\sigma_{(ma^2)}$$ Eq(01)
$$II)$$ Calculando a incerteza de $$ma^2$$:
Como este é um produto, utilizaremos a regra do produto para as incertezas:
$$\left(\dfrac{\sigma_{(ma^2)}}{ma^2}\right)^2=\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{\sigma_{(a^2)}}{a^2}\right)^2$$ Eq(02)
$$III)$$ Calculando a incerteza de $$a^2$$
Pela regra da potência temos:
$$\sigma_{(a^2)}=2a\sigma_a$$ Eq(03)
Juntando as Eq(03) e Eq(02):
$$\left(\dfrac{\sigma_{(ma^2)}}{ma^2}\right)^2=\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{2a\sigma_a}{a^2}\right)^2$$
$$\left(\dfrac{\sigma_{(ma^2)}}{ma^2}\right)^2=\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{2\sigma_a}{a}\right)^2$$
$$\sigma_{(ma^2)}=ma^2\sqrt{\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{2\sigma_a}{a}\right)^2}$$ Eq(04)
Juntando as Eq(04) e Eq(01):
$$\boxed{\sigma_g=\dfrac{ma^2}{12}\sqrt{\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{2\sigma_a}{a}\right)^2}}$$
Analogamente, podemos calcular a incerteza de $$h$$:
$$\boxed{\sigma_h=\dfrac{mb^2}{12}\sqrt{\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{2\sigma_b}{b}\right)^2}}$$
Como o momento de inércia é dado pela soma das funções $$g$$ e $$h$$, temos que:
$$(\sigma_I)^2=(\sigma_g)^2+(\sigma_h)^2$$
$$(\sigma_I)^2=\left(\dfrac{ma^2}{12}\right)^2\left[\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{2\sigma_a}{a}\right)^2\right]^2+\left(\dfrac{mb^2}{12}\right)^2\left[\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{2\sigma_b}{b}\right)^2\right]^2$$
$$\boxed{\sigma_I=\sqrt{\left(\dfrac{ma^2}{12}\right)^2\left[\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{2\sigma_a}{a}\right)^2\right]^2+\left(\dfrac{mb^2}{12}\right)^2\left[\left(\dfrac{\sigma_m}{m}\right)^2+\left(\dfrac{2\sigma_b}{b}\right)^2\right]^2}}$$
Transformando os valores fornecidos para o SI:
$$m=0,01108 kg$$, $$\sigma_m=0,00001 kg$$, $$a=0,0250 m$$, $$b=0,3100 m$$ e $$\sigma_a=\sigma_b=0.0005 m$$
Aplicando valores chegamos a:
$$\boxed{\sigma_I=4\cdot 10^{-9} kg\cdot m^2}$$
Portanto, calculado o valor para o momento de inércia, chegamos a:
$$\boxed{I=(89309\pm 4)\cdot 10^{-9} kg\cdot m^2}$$
Parte B
$$a)$$ Para essa solução, utilizaremos a definição de momento de inércia diretamente:
$$I=\displaystyle \int r^2dm$$

Figura 02: Fita adesiva
sendo $$\sigma$$ a densidade superficial de área temos:
$$\sigma=\dfrac{4M}{\pi(d_2^2-d_1^2)}$$
Logo:
$$I=\displaystyle \int r^2\cdot \sigma dA=\sigma \displaystyle \int r^2\cdot 2\pi rdr$$
$$I=\dfrac{4M}{\pi(d_2^2-d_1^2)}\cdot 2\pi \displaystyle \int_{\frac{d_1}{2}}^{\frac{d_2}{2}} r^3dr$$
$$I=\dfrac{8M}{d_2^2-d_1^2}\cdot \dfrac{d_2^4-d_1^4}{64}$$
Logo:
$$\boxed{I=\dfrac{M(d_1^2+d_2^2)}{8}}$$
$$b)$$ Análogo ao resultado encontrado na parte A, temos:
$$\boxed{\sigma_I=\sqrt{\left(\dfrac{Md_1^2}{8}\right)^2\left[\left(\dfrac{\sigma_M}{M}\right)^2+\left(\dfrac{2\sigma_{d_1}}{d_1}\right)^2\right]^2+\left(\dfrac{Md_2^2}{8}\right)^2\left[\left(\dfrac{\sigma_M}{M}\right)^2+\left(\dfrac{2\sigma_{d_2}}{d_2}\right)^2\right]^2}}$$
Aplicando valores:
$$\boxed{\sigma_I=2\cdot 10^{-9} kg\cdot m^2}$$
Calculando o valor para o momento de inércia e aplicando a incerteza:
$$\boxed{I=(9121\pm 2)\cdot 10^{-9} kg\cdot m^2}$$
Parte C
$$a)$$ Pelo teorema dos eixos paralelos, sabemos que o momento de inércia em relação a um ponto de apoio a uma distância $$d$$ é:
$$I=I_{cm}+md^2$$
$$I=m(R^2+d^2)$$
Aplicando a segunda lei de Newton para a rotação:
$$-mgd\cdot \sin{\theta}=I\alpha$$
$$-mgd\sin{\theta}=m(R^2+d^2)\alpha$$
Como o ângulo é pequeno:
$$\sin{\theta}\approx \theta$$
Portanto:
$$\ddot{\theta}=-\left(\dfrac{gd}{R^2+d^2}\right)\theta$$
Essa é a equação de um MHS, seu período de oscilação é:
$$\boxed{T=2\pi\sqrt{\dfrac{R^2+d^2}{gd}}}$$
$$b)$$ Pela desigualdade das médias temos que:
$$\dfrac{a+b}{2}\geq \sqrt{ab}$$
A igualdade ocorre para $$a=b$$.
Portanto:
$$\dfrac{\dfrac{R^2}{d}+d}{2}\geq \sqrt{\dfrac{R^2}{d} \cdot d}=R$$
O valor mínimo ocorrerá para:
$$\dfrac{R^2}{d}=d$$
$$\boxed{d=R}$$
$$c)$$ Plotando o gráfico do período em função da distância temos:

Figura 03: Gráfico $$T$$x$$d$$
Aproximando o gráfico ao redor da abscissa de período mínimo:

Figura 04: Aproximação da Figura 03
Olhando para a figura, podemos obter um valor aproximado para o raio em torno de $$6,70 cm$$.
$$\boxed{R\approx 6,70 cm}$$
OBS: Qualver valor entre $$6,50 cm $$ e $$7,00 cm$$ também é uma aproximação boa.
$$d)$$ Primeiramente, iremos fazer uma tabela de $$dT^2$$ e $$d^2$$, com suas respectivas incertezas:

Figura 05: Tabela $$dT^2$$ e $$d^2$$
Plotando o gráfico de $$dT^2$$ em função de $$d^2$$ obtemos:

Figura 06: Gráfico $$dT^2$$ x $$d^2$$
$$e)$$ Organizando um pouco a equação do período, chegamos a:
$$d\cdot T^2=\dfrac{4\pi^2R^2}{g}+\dfrac{4\pi^2}{g}\cdot d^2$$
Se renomearmos as variáveis:
$$Y=d\cdot T^2$$, $$A=\dfrac{4\pi^2R^2}{g}$$, $$B=\dfrac{4\pi^2}{g}$$, e $$X=d^2$$
Temos que:
$$Y=A+BX$$
Essa é a equação de uma reta.
Utilizando a função regressão linear da calculadora casio, achamos:
$$A=(1,16\pm 0,05)\cdot 10^{-5} m\cdot s^2$$ e $$B=(4,09\pm 0,05)m^{-1}s^2$$
$$I)$$
$$B=\dfrac{4\pi^2}{g}$$
$$\rightarrow g=\dfrac{4\pi^2}{B}$$
$$\rightarrow \sigma_g=\dfrac{4\pi^2}{B^2}\sigma_B$$
Aplicando valores chegamos a:
$$\boxed{g=(9,7\pm 0,1)m\cdot s^{-2}}$$
$$II)$$
$$A=\dfrac{4\pi^2R^2}{g}$$
$$R=2\pi\sqrt{Ag}$$
Primeiramente, temos que:
$$\sigma_{Ag}=Ag\sqrt{\left(\dfrac{\sigma_A}{A}\right)^2+\left(\dfrac{\sigma_g}{g}\right)^2}$$
Da equação para o $$R$$ temos:
$$\sigma_R=2\pi\cdot \dfrac{1}{2}\cdot \dfrac{1}{\sqrt{Ag}}\sigma_{Ag}$$
$$\sigma_R=\pi \sqrt{Ag}\cdot \sqrt{\left(\dfrac{\sigma_A}{A}\right)^2+\left(\dfrac{\sigma_g}{g}\right)^2}$$
Aplicando valores chegamos a:
$$\boxed{R=(0,067\pm 0,002)m}$$
Parte A
$$a)$$
Demonstração
$$b)$$
$$\boxed{I=(89309\pm 4)\cdot 10^{-9} kg\cdot m^2}$$
Parte B
$$a)$$
Demontração
$$b)$$
$$\boxed{I=(9121\pm 2)\cdot 10^{-9} kg\cdot m^2}$$
Parte C
$$a)$$
Demonstração
$$b)$$
Demonstração
$$c)$$
$$\boxed{R\approx 6,70 cm}$$
$$d)$$
$$e)$$
$$\boxed{g=(9,7\pm 0,1)m\cdot s^{-2}}$$
$$\boxed{R=(0,067\pm 0,002)m}$$